
抛喷丸强化是一种广泛使用的方法,其在工件表面产生压缩应力,使其更耐用。如许多制造工艺一样,抛喷丸强化也需要包括应力值的质量控制。用于测量抛喷丸强化工件残余应力的常用技术是X射线衍射。
Stresstech在无损过程控制和质量检验方面拥有30多年的经验。Stresstech产品线包括利用巴克豪森噪声技术、孔钻(ESPI:电子散斑图案干涉术)以及本文焦点 - X射线衍射的应力分析仪。随着技术和制造的进步,产品线包括许多自动测量功能,并使用了工业机器人。工业机器人可用于测量具有复杂形状和宽表面工件的残余应力,通过自动化创建灵活的测量过程。Stresstech机器人的X射线测量系统被称为Xstress机器人。

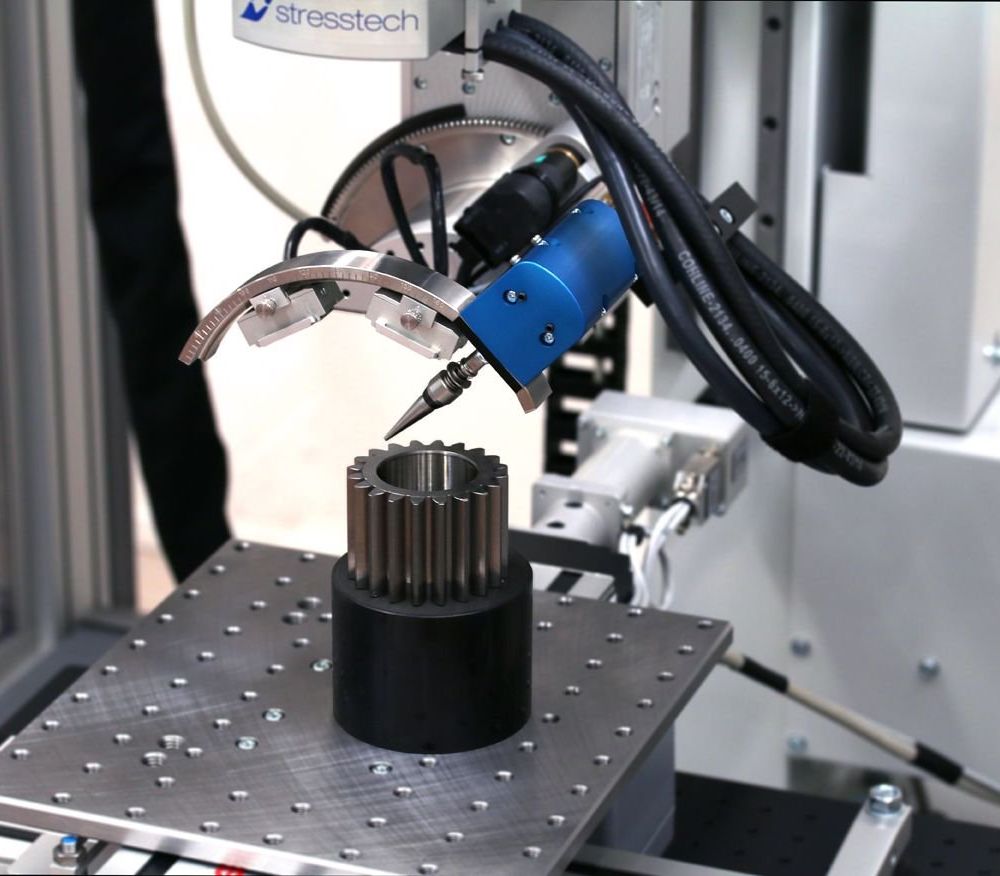
图1:机器人通过 X 射线衍射在具有复杂形状、宽表面或难以到达区域的零件上简易测量残余应力
根据X射线衍射数据测定残余应力
X射线是具有较短波长(即比可见光具有更高的能量)的电磁辐射波。短波长X射线非常适合探测材料中的面间距。使用面间距作为极限标距长度,X射线技术是理想的技术,并适用于所有结晶材料,特别是金属,同时也适用于陶瓷。其测量应力,而无需无应力样品进行校准。
具有周期性晶格结构的材料可以用所谓的单位晶胞描述,其是包含用于各种材料晶体结构信息的小体积单元。通过连接原子所在的点形成晶格结构。用于描述这些单位晶胞的常用的坐标系是米勒指数计数法。
常见的X射线源是X射线管,其中电子被轰击至目标金属阳极。通过加热充当阴极的钨丝形成热离子电子。用高电压(25 kV至60 kV)将电子加速,这给予电子足够的能量使其从目标金属原子,发射特定于阳极材料的标识特征射线,这种接近单色射线可用于X射线衍射分析。
通过衍射峰位置计算应变,由衍射数据确定残余应力。作用在测量材料上的应力改变了晶面间距,其可以被测量。在实践中,首先测量无应力的金属粉末以对特定材料的器件进行校准。在校准期间,将检测器放置到粉末的已知衍射角,并设置角度盘。然后通过测量具有多个倾斜角的晶格距离来计算应力,并且结果被绘制为d vs sin2X图,其中d是测量的晶面间距,X是倾斜角。可从该d vs sin2X图的斜率确定残余应力。
X射线衍射是测量残余应力的非破坏性的、简便的方法。曝光区域量会影响测量时间,而使用较大的准直器会减少测量所需时间。

图2:来自晶格面的X射线衍射(布拉格定律)
布拉格定律描述了来自晶格面的X射线衍射。表示为λ=2dsinθ,其中λ是X射线的波长,d是晶面间距,θ是衍射角,如图2所示。布拉格定律假定入射波和衍射波同相并经历相长干涉。布拉格定律已证明其本身是的、正确的,使其成为衍射应用的有用工具。
用机器人达到极限
工业机器人系统包括具有多个轴的机器人臂,其由机器人控制器控制。控制器还可以控制外部轴和旋转单元,可用于操作工件。机器人具有不同的尺寸、不同的有效载荷和可达性。机器人应用的重要部分是附接到机器人凸缘的工具,机器人需要完成其任务。该工具几乎可以是任何东西:夹子、焊枪、点胶机等。机器人系统通常具有外围I/O设备,其可以通过机器人控制器进行操作和监视。其中一个关键特征是机器人也是可重新编程的。
Xstress机器人系统是用于测量残余应力的交钥匙解决方案。它使用工业机器人作为测角仪,从而为测量过程带来更多的灵活性和自动化。Xstress机器人系统由包括机器人控制器、X射线管和准直器的工业机器人、X3003主机和带有XTronic软件的计算机组成。作为选项,Xstress机器人可以使用迷你管而非标准的G3 X射线管进入图3所示的较小空间。
在X射线测量中使用Xstress机器人与工业机器人的优势是能够将G3测量头移动到其他难以到达的空间,从而生成准确的测量结果。宽工作区为Xstress机器人提供了测量大型、复杂零件的方法,无需在测量之间移动零件。此外,由于XTronic中测量点的映射特征,测量过程是自动的。Xstress机器人是敏捷的,能移动至难以到达的位置(如可以移动至圆柱形管),而对标准测角仪来说这是一个不可能的任务。机器人可轻易地将测量头带入管内以测量如图4所示的管焊缝的应力。

图4:Xstress机器人测量圆柱体零件的内部
该系统可以包括外部轴线以在测量期间旋转诸如曲轴的零件,从而给予机器人更多的可用于测量的空间。Xstress机器人系统可以利用旋转轴访问:例如轴的各侧。旋转单元是高度自动化应用的理想选择,如图5所示。
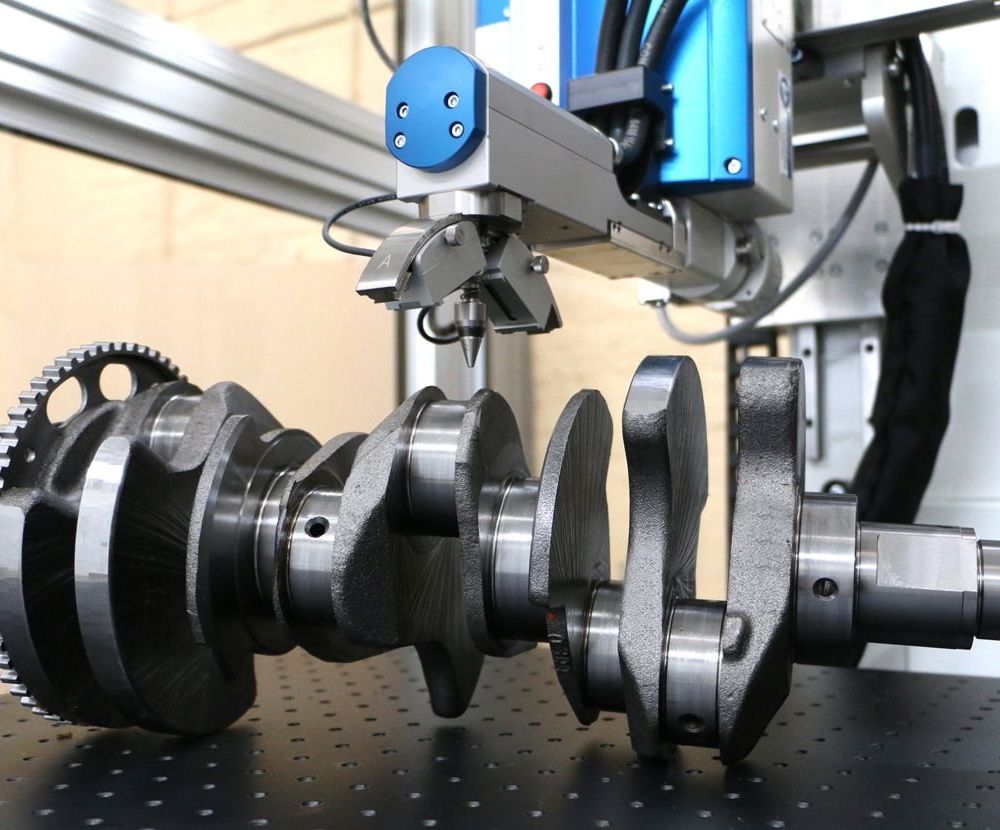
图5:Xstress机器人在曲轴上进行测量
使用方便
Stresstech在设计Xstress机器人时考虑了终用户。大多数工作是使用XTronic软件完成的,XTronic软件控制机器人并计算残余应力。在正常操作中,首先将附接到机器人臂的G3测角仪手动定位到测量位置。位置被映射到测量程序,然后通过XTronic软件加以执行。在测量程序期间,机器人将G3测角仪移动到测量位置,并根据XTronic中定义的参数测量工件。实时计算残余应力,用XTronic在图中显示数据。终用户无需为数据处理花费时间,因为能以用户友好的形式从XTronic中即刻读取测量结果。
XTronic提供各种功能支持Xstress机器人测角仪的操作。可以通过XTronic将机器人移动到编程位置,无需使用机器人示教器。这有助于验证测量点。此外,XTronic具有对准X射线管以实现更准确测量结果的功能。必须手动进行标准测角仪的对准,机器人测角仪只能通过修改XTronic的工具数据和机器人自动对准本身进行对齐。
测量服务
Stresstech集团在芬兰、德国、印度和美国的实验室设施为客户提供不同方法的测量服务。客户可以将抛喷丸强化的工件直接送到实验室进行X射线测量。该服务是一个很好的选择,若需测量有*的工件,安装自己的机器人系统将不再是所要求的解决方案。Stresstech的测量实验室配备了各种测量工具,包括Xstress机器人系统,主要用于测量大型、复杂的工件。也可以寻求当地w
若需测量的工件太大,则无法将其送到实验室。由于Xstress Robot的移动性,也可以在现场进行测量。在测量实验室使用的Xstress机器人系统是一个安装在移动推车上的一体化包装系统,能以小的工作量将其带到客户的工厂场地。由于Xstress机器人非常紧凑从而可以装进一辆面包车,可以将整个Xstress机器人系统很容易地运输到客户的工厂进行压力测量。
移动性也有利于机器人的可达性极限。即使极大的工件,也可以通过在测量位置之间移动Xstress机器人而非移动工件来进行测量。首先,机器人可以移动到某个位置,并且所有的测量均可在机器人的可达性内完成。接下来,机器人被移动到新位置以用于下一测量,而无需移动重工件。重复该过程,直到完成所有测量。得益于Xstress机器人系统的移动性,能以小的工作量和短测量时间现场测量大型、复杂的工件。
Stresstech Oy的测量服务实验室为客户提供服务,是一家通过非破坏性X射线衍射法进行残余应力和残余奥氏体测量的测试实验室。(SFS-EN ISO/IEC 17025:20050)测量实验室(FINAS T294)。
